HAL FDCAN use cases ¶
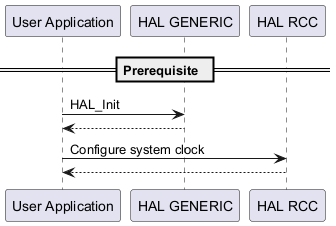
Prerequisite ¶
Full FDCAN Initialization Sequence ¶
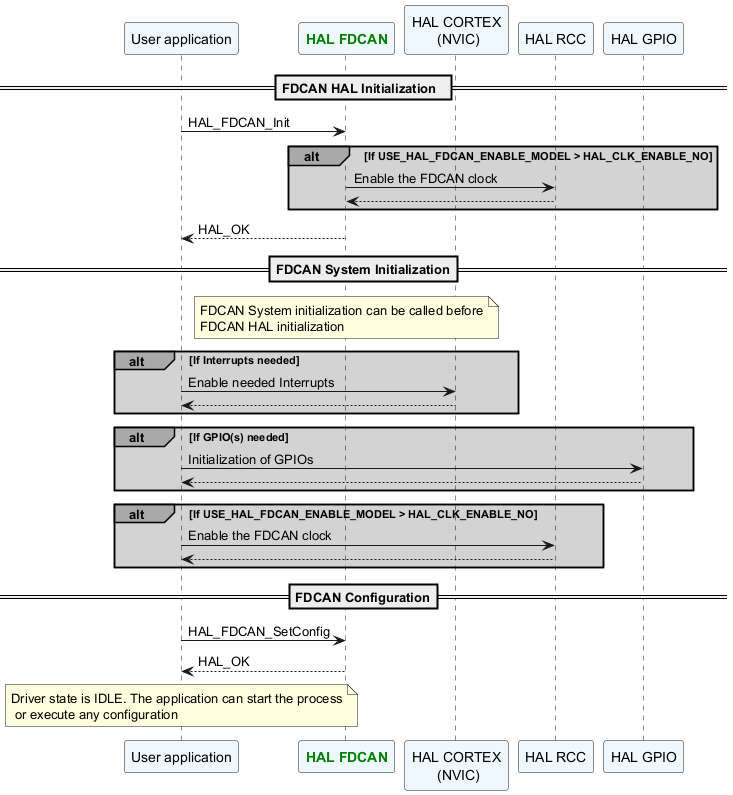
Functions called:
Full FDCAN Initialization and Configuration Sequence ¶
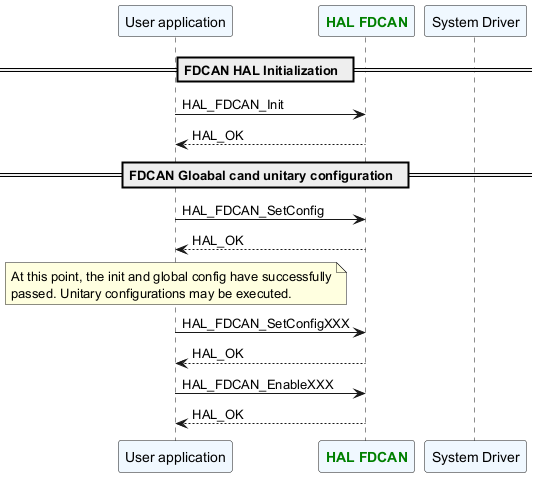
Functions called:
-
HAL_FDCAN_SetConfigXXX() -
HAL_FDCAN_EnableXXX()
Full FDCAN Deinitialization Sequence ¶
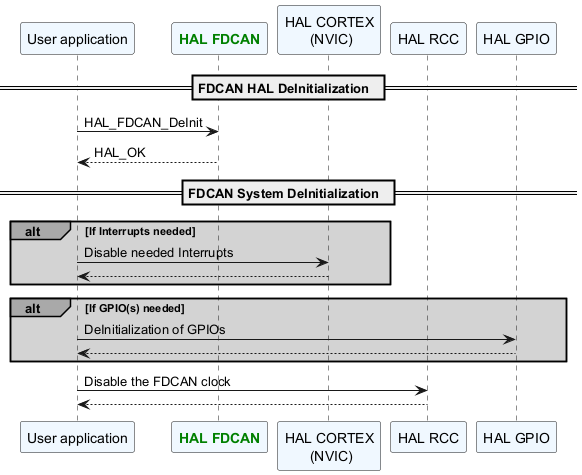
Functions called:
FDCAN Transmit Message Polling Mode Using HAL_FDCAN_GetTxFifoFreeLevel ¶
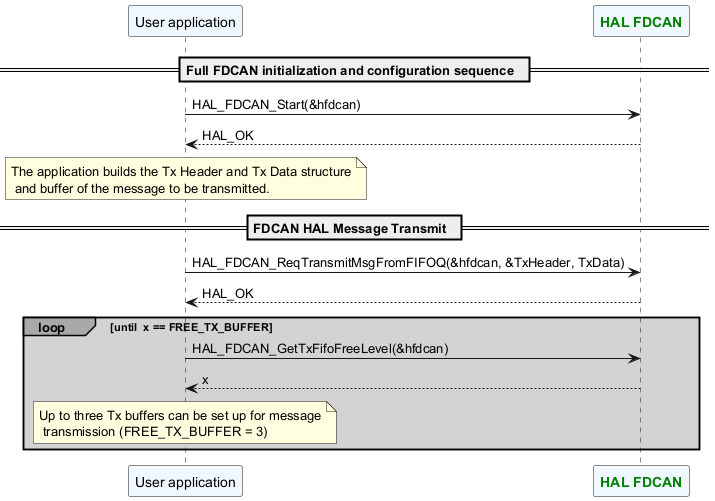
Functions called:
FDCAN Transmit Message Polling Mode Using HAL_FDCAN_GetTxBufferMessageStatus ¶
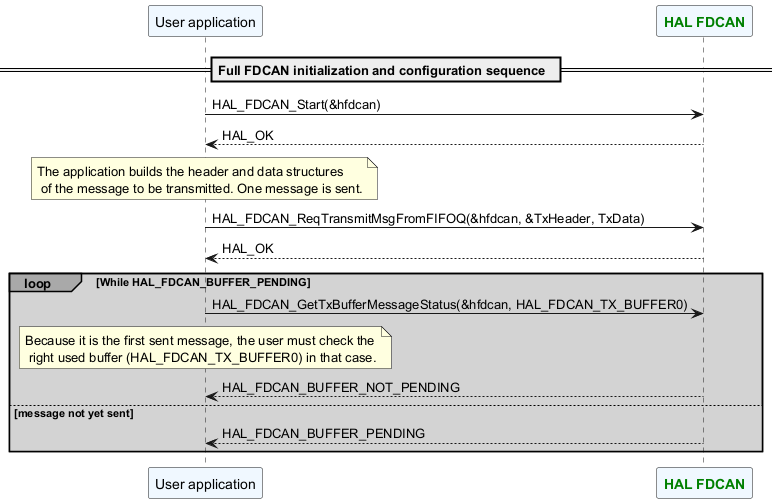
Functions called:
FDCAN Reading Message Polling Mode Using HAL_FDCAN_GetRxFifoFillLevel ¶
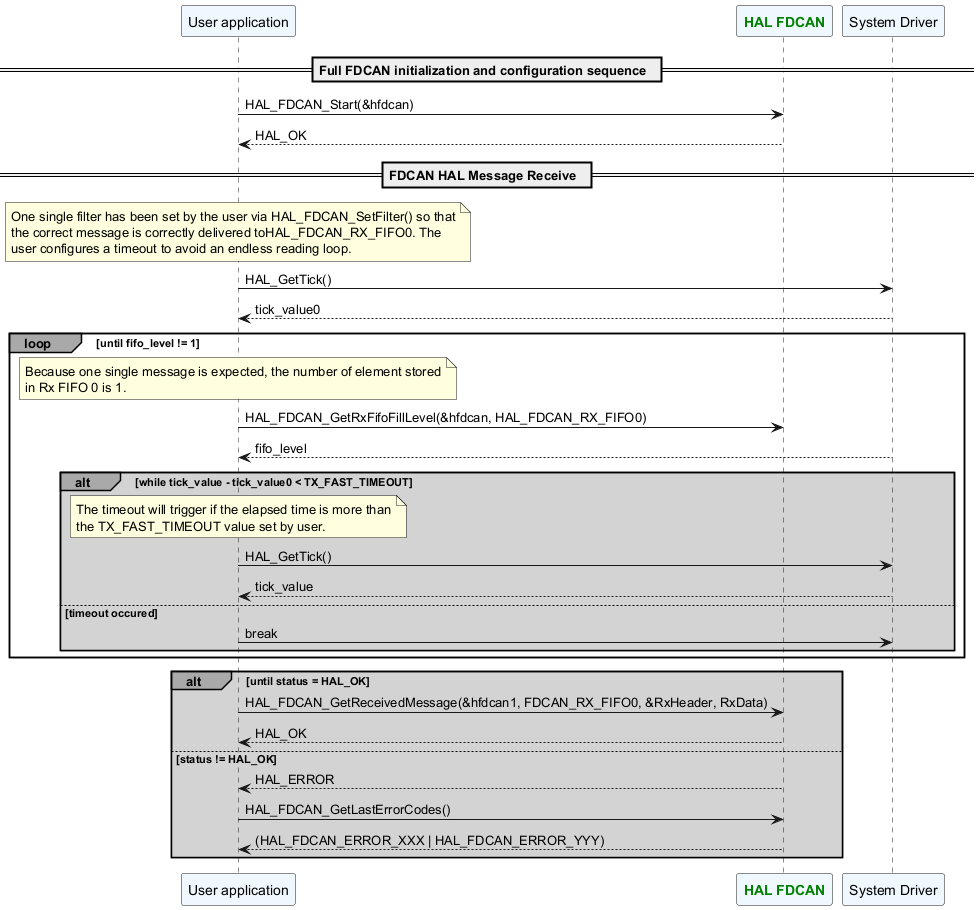
Functions called:
FDCAN Transmission with IT Using Tx Complete/Tx Cancellation Interrupts ¶
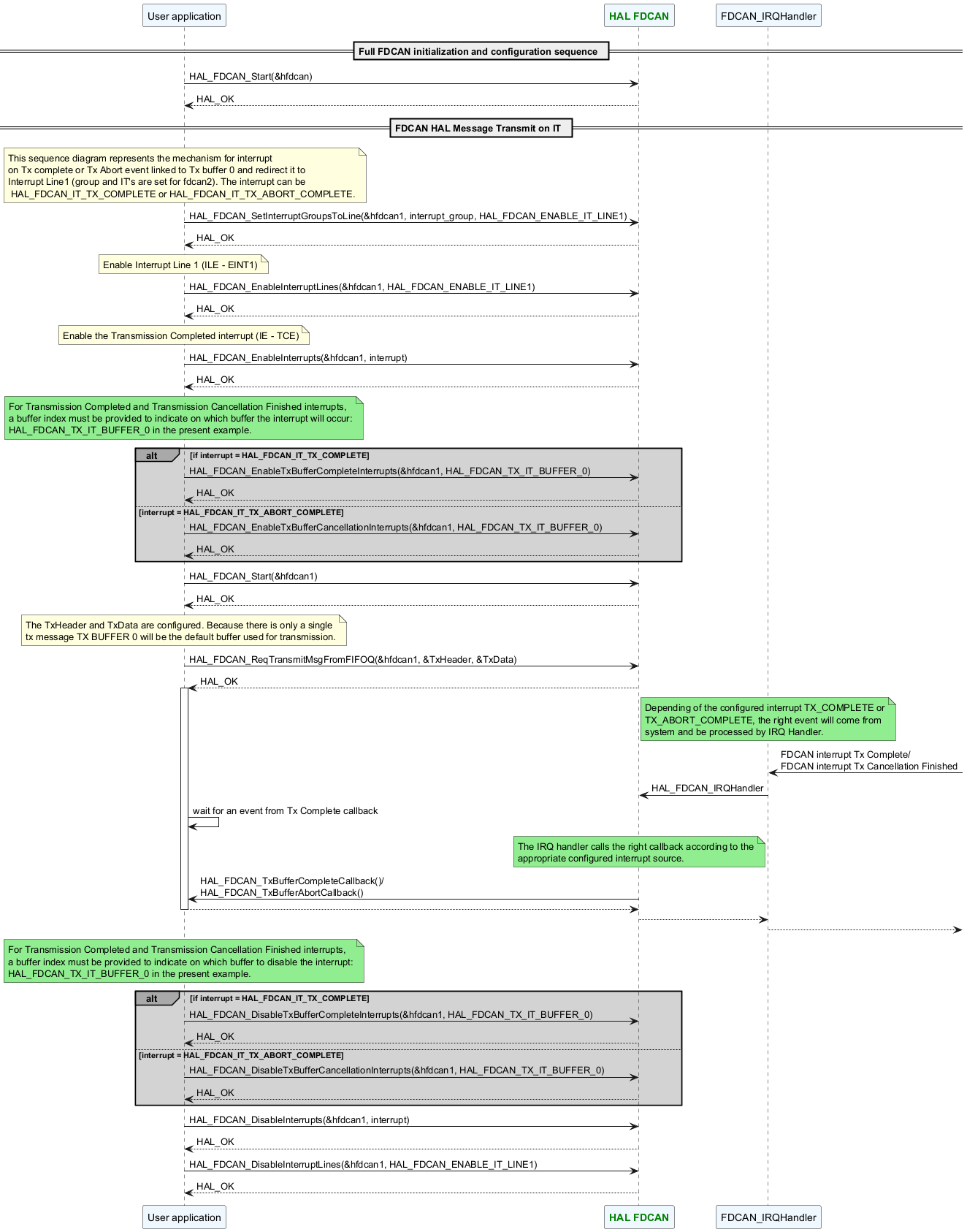
Functions called:
FDCAN Receiving Message Using the Rx High-Priority Message Interrupt (HPME) ¶
![@startuml
participant "User application" as App#AliceBlue
participant "<font color=green><b>HAL FDCAN" as FDCAN#AliceBlue
participant "FDCAN_IRQHandler" as IRQHandler#AliceBlue
== Full FDCAN initialization and configuration sequence ==
App -> FDCAN: HAL_FDCAN_Start(&hfdcan)
FDCAN --> App: HAL_OK
== FDCAN HAL Message Receive High-Priority Message on IT ==
Note over App#lightyellow: This sequence diagram represents the mechanism for interrupt\non High priority message receiving and redirect it to\ninterrupt line0 (group and IT's are set for fdcan2)
App -> FDCAN: HAL_FDCAN_SetInterruptGroupsToLine(&hfdcan1, HAL_FDCAN_IT_GROUP_STATUS_MSG, HAL_FDCAN_ENABLE_IT_LINE0)
FDCAN --> App: HAL_OK
Note over App#lightyellow: Enable Interrupt Line 0 (ILE - EINT0)
App -> FDCAN: HAL_FDCAN_EnableInterruptLines(&hfdcan1, HAL_FDCAN_ENABLE_IT_LINE0)
FDCAN --> App: HAL_OK
Note over App#lightyellow: Enable the Transmission Completed interrupt (IE - HPME)
App -> FDCAN: HAL_FDCAN_EnableInterrupts(&hfdcan1, HAL_FDCAN_IT_RX_HIGH_PRIORITY_MSG)
FDCAN --> App: HAL_OK
Note over App#lightyellow: The ID filter element is configured with filter element configuration SFEC[2:0]\nor EFEC[2:0] set at 100, 101, 110 values to set priority if filter matches.
App -> FDCAN : HAL_FDCAN_SetFilter(&hfdcan1, p_filter_config)
FDCAN --> App : HAL_OK
App -> FDCAN : HAL_FDCAN_SetGlobalFilter(&hfdcan1, p_global_filter_config)
FDCAN --> App : HAL_OK
App -> FDCAN : HAL_FDCAN_Start(&hfdcan1)
FDCAN --> App : HAL_OK
activate App
IRQHandler <- : FDCAN interrupt High Priority Message
IRQHandler -> FDCAN : HAL_FDCAN_IRQHandler
App -> App : wait until a High Priority message is received.
FDCAN -> App : HAL_FDCAN_HighPriorityMessageCallback(&hfdcan1)
App --> FDCAN :
deactivate App
App -> FDCAN: HAL_FDCAN_DisableInterrupts(&hfdcan1, HAL_FDCAN_IT_RX_HIGH_PRIORITY_MSG)
FDCAN --> App: HAL_OK
App -> FDCAN: HAL_FDCAN_DisableInterruptLines(&hfdcan1, HAL_FDCAN_ENABLE_IT_LINE0)
FDCAN --> App: HAL_OK
@enduml](../../../../_images/plantuml-189ffc7c9a83ecee0cd628450ec890c500e3aea7.png)
Functions called:
FDCAN Transmit Abort Using Transmission Cancellation Finished Interrupt ¶
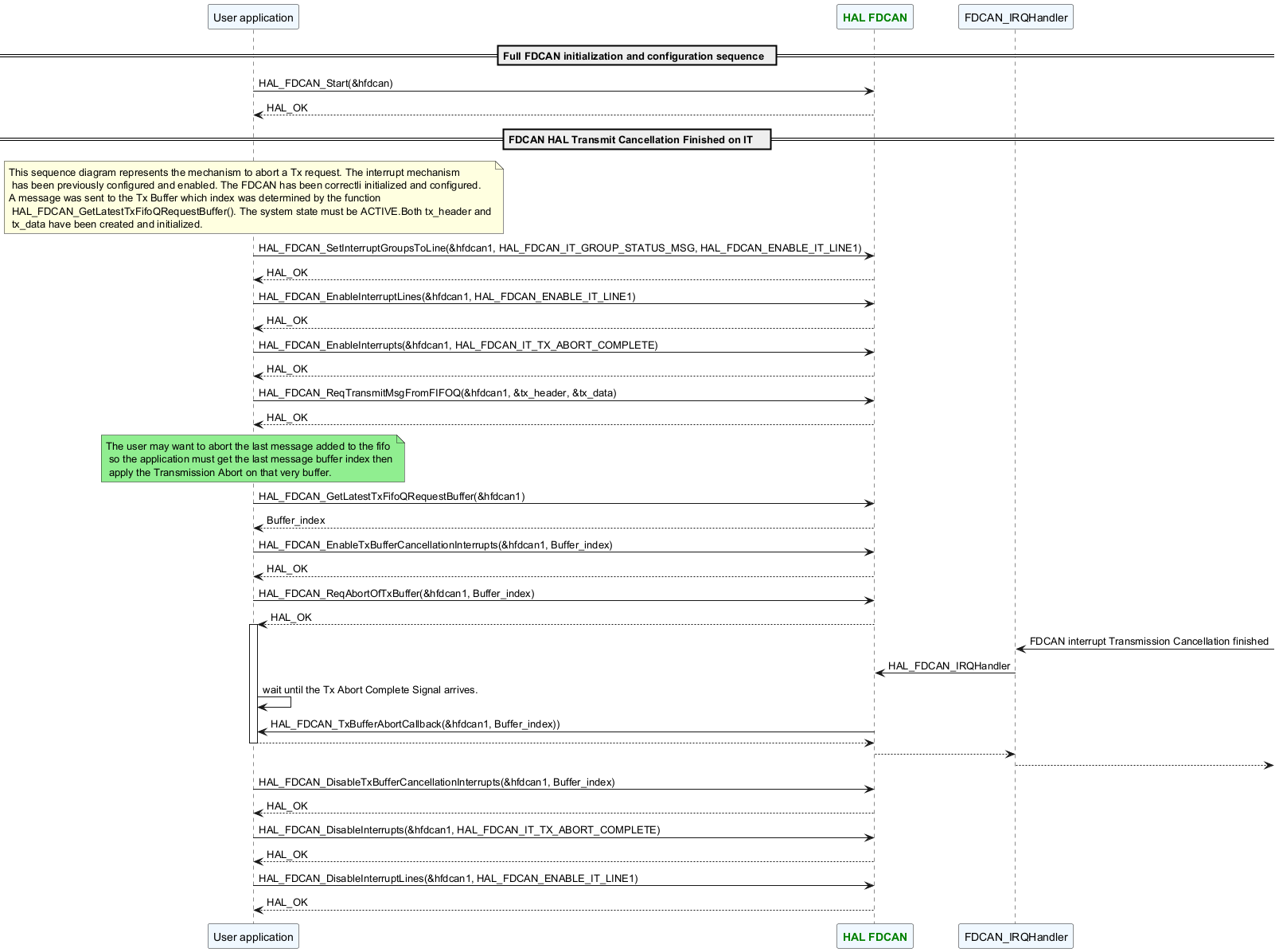
Functions called: