
Use Cases ¶
Periodic Task Execution (LED Toggle) ¶
This use case illustrates periodic GPIO toggling driven by the Sequencer. It requires:
A task that updates the GPIO state.
A periodic trigger (for example SysTick) that schedules the task, ensuring regular toggles without blocking the main loop.
The code required to implement the periodic LED toggle is as follows:
Task implementation (GPIO toggle):
void gpio_toggle_task(void)
{
/* Toggle GPIO pin */
HAL_GPIO_TogglePin(MX_EXAMPLE_GPIO_PORT, MX_EXAMPLE_GPIO_PIN);
}
Periodic trigger (for example SysTick) schedules the task:
void SysTick_Handler(void)
{
/* Schedule LED task at high priority (0) */
SEQ_SetTask(TASK1, 0);
}
The following diagram summarizes this periodic sequence:
![@startuml Sequencer_usecase_led_toggle
' Extracted verbatim from dynamic_behavior.md (Simple LED toggle)
' Keep original styling
title **Periodic LED toggle using the Sequencer**
participant "User Application" as UA
participant "Sequencer" as SEQ
participant "TASK1" as TASK1
participant "TASK_IDLE" as TASK_IDLE
participant "SysTick Handler" as PERIODIC
UA -> PERIODIC: configure a periodic trigger
group #LightGreen Init
UA -> SEQ : SEQ_init();
UA -> SEQ : SEQ_RegTask(TASK1,..);
UA -> SEQ : SEQ_SetTask(TASK1,...);
end
group #LightYellow Process : infinite loop
UA --> SEQ : SEQ_Run();
SEQ --> TASK1 : Call task 1
rnote over "TASK1" : GPIO toggle
SEQ <-- TASK1 : Task 1 complete
hnote over "TASK_IDLE" #LightBlue : no task set, the Sequencer execute the IDLE
SEQ --> TASK_IDLE : Call task IDLE
PERIODIC <[#Orange]-- : Periodic interrupt/trigger
PERIODIC --> SEQ : SEQ_SetTask(TASK1,...);
SEQ <-- TASK_IDLE : task IDLE complete
end
@enduml](../../_images/plantuml-8255d033464edf66a66626356bb005ef38148e78.png)
Task Idle and Low-Power Management (LED Toggle) ¶
This use case extends the periodic toggle example and shows how the Sequencer enables low-power operation. Compared to the previous example, the following must be added:
Implement the idle task to enter low-power mode when no tasks are scheduled.
Ensure the periodic trigger (for example SysTick) wakes the system from low-power mode to schedule the toggle task.
The code required to implement low-power operation with the idle task is as follows:
Idle task implementation (enter low-power mode):
void sequencer_idle_task(void)
{
/* Enter low-power mode until the next interrupt */
HAL_PWR_EnterSleepMode(HAL_PWR_LOW_PWR_MODE_WFI);
}
The following diagram summarizes this low-power sequence:
![@startuml Sequencer_usecase_led_toggle_low_power_mode
' Extracted verbatim from dynamic_behavior.md (Simple LED toggle)
' Keep original styling
title **Periodic LED toggle using the Sequencer in Low Power Mode**
participant "User Application" as UA
participant "Sequencer" as SEQ
participant "TASK1" as TASK1
participant "TASK_IDLE" as TASK_IDLE
participant "SysTick Handler" as PERIODIC
UA -> PERIODIC: configure a periodic trigger
group #LightGreen Init
UA -> SEQ : SEQ_init();
UA -> SEQ : SEQ_RegTask(TASK1,..);
UA -> SEQ : SEQ_SetTask(TASK1,...);
end
group #LightYellow Process : infinite loop
UA --> SEQ : SEQ_Run();
SEQ --> TASK1 : Call task 1
rnote over "TASK1" : GPIO toggle
SEQ <-- TASK1 : Task 1 complete
hnote over "TASK_IDLE" #LightBlue : no task set, the Sequencer execute the IDLE
SEQ --> TASK_IDLE : Call task IDLE
group IDLE Task
SEQ --> UA : HAL_PWR_EnterSleepMode(HAL_PWR_LOW_PWR_MODE_WFI)
end
PERIODIC <[#Orange]-- : Periodic interrupt/trigger
PERIODIC --> SEQ : SEQ_SetTask(TASK1,...);
SEQ <-- TASK_IDLE : task IDLE complete
end
@enduml](../../_images/plantuml-371c1580f520e9afa59cd42d4485cc38beed5eea.png)
Managing Task Waiting with
SEQ_WaitEvt
(LED Toggle)
¶
This use case illustrates an event-driven GPIO toggle using the Sequencer. It requires:
A task that waits for an event and toggles the GPIO when the event is signaled.
A periodic source (for example SysTick) that sets the event to wake the waiting task.
The code required to implement the event-based LED toggle is as follows:
Task function (waits for event before toggling):
void gpio_toggle_wait_evt(void)
{
/* Wait for the event set by the timer interrupt */
SEQ_WaitEvt(EVT_TOGGLE_READY);
/* Perform the toggle */
HAL_GPIO_TogglePin(MX_EXAMPLE_GPIO_PORT, MX_EXAMPLE_GPIO_PIN);
/* Schedule the task at high priority (0) */
SEQ_SetTask(TASK1, 0);
}
SysTick callback:
void SysTick_Handler(void)
{
/* Signal the event to wake the waiting task */
SEQ_SetEvt(EVT_TOGGLE_READY);
}
The following diagram summarizes this event-driven sequence:
![@startuml sequencer_usecase_led_toggle_wait_evt
' Extracted verbatim from dynamic_behavior.md (LED Toggle using SEQ_WaitEvt())
' Keep original styling
title **LED Toggle using SEQ_WaitEvt()**
participant "User Application" as UA
participant "Sequencer" as SEQ
participant "TASK1" as TASK1
participant "TASK_IDLE" as TASK_IDLE
participant "SysTick Handler" as TIM_INT
UA -> TIM_INT: configure a periodic trigger
group #LightGreen Init
UA -> SEQ : SEQ_init();
UA -> SEQ : SEQ_RegTask(TASK1,..);
UA -> SEQ : SEQ_SetTask(TASK1,...);
end
group #LightYellow Process : infinite loop
UA -> SEQ : SEQ_Run();
SEQ --> TASK1 : Call task 1
group #LightBlue infinite loop :Task1 on SEQ_WaitEvt
group sub SEQ_Run until event occurs
rnote over "SEQ" : SEQ_Run()
SEQ --> TASK_IDLE : Call task IDLE
TIM_INT <[#Orange]-- : Periodic interrupt/trigger
TIM_INT --> SEQ : SEQ_SetEvt();
SEQ <-- TASK_IDLE : task IDLE complete
end
rnote over "TASK1" : GPIO toggle
end
end
@enduml](../../_images/plantuml-0a37003bceb05f3f95f0fee191ab297af28656ae.png)
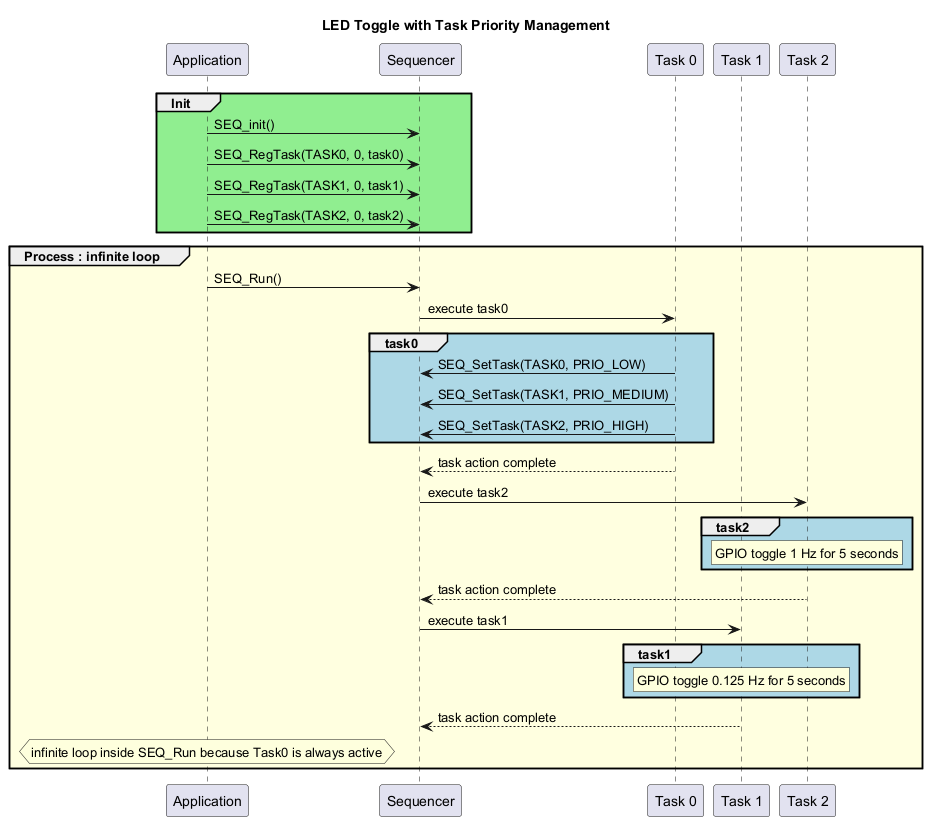
Task Priority Management (LED Toggle) ¶
This use case shows how the Sequencer manages task priorities using three tasks:
Task 0: schedules Task 0 (low priority), Task 1 (medium priority), and Task 2 (high priority).
Task 1: toggles a GPIO at 0.5 Hz for 5 seconds.
Task 2: toggles a GPIO at 4 Hz for 5 seconds.
The Sequencer executes tasks according to their assigned priorities.
The code required to implement the task priority management is as follows:
Task 0 function (schedules the three tasks):
void task0(void)
{
/* Schedule Task 0 (low priority) */
SEQ_SetTask(TASK0, 2);
/* Schedule Task 1 (medium priority) */
SEQ_SetTask(TASK1, 1);
/* Schedule Task 2 (high priority) */
SEQ_SetTask(TASK2, 0);
}
Task 1 function (toggles GPIO at 0.5 Hz for 5 seconds):
void task1(void)
{
/* Store the start time in milliseconds */
uint32_t low_freq_toggle_time_start = HAL_GetTick();
/* Loop to toggle the GPIO pin at low frequency */
do
{
HAL_GPIO_TogglePin(MX_EXAMPLE_GPIO_PORT, MX_EXAMPLE_GPIO_PIN);
/* Wait for a predefined delay (LOW_FREQ_TOGGLE_PERIOD) */
HAL_Delay(LOW_FREQ_TOGGLE_PERIOD);
/* Continue looping until the toggle time limit is reached */
} while ((HAL_GetTick() - low_freq_toggle_time_start) < GPIO_TOGGLE_DURATION);
}
Task 2 function (toggles GPIO at 4 Hz for 5 seconds):
void task2(void)
{
/* Store the start time in milliseconds */
uint32_t high_freq_toggle_time_start = HAL_GetTick();
/* Loop to toggle the GPIO pin at high frequency */
do
{
HAL_GPIO_TogglePin(MX_EXAMPLE_GPIO_PORT, MX_EXAMPLE_GPIO_PIN);
/* Wait for a predefined delay (HIGH_FREQ_TOGGLE_PERIOD) */
HAL_Delay(HIGH_FREQ_TOGGLE_PERIOD);
/* Continue looping until the toggle time limit is reached */
} while ((HAL_GetTick() - high_freq_toggle_time_start) < GPIO_TOGGLE_DURATION);
}
The following diagram summarizes this priority-based task execution:
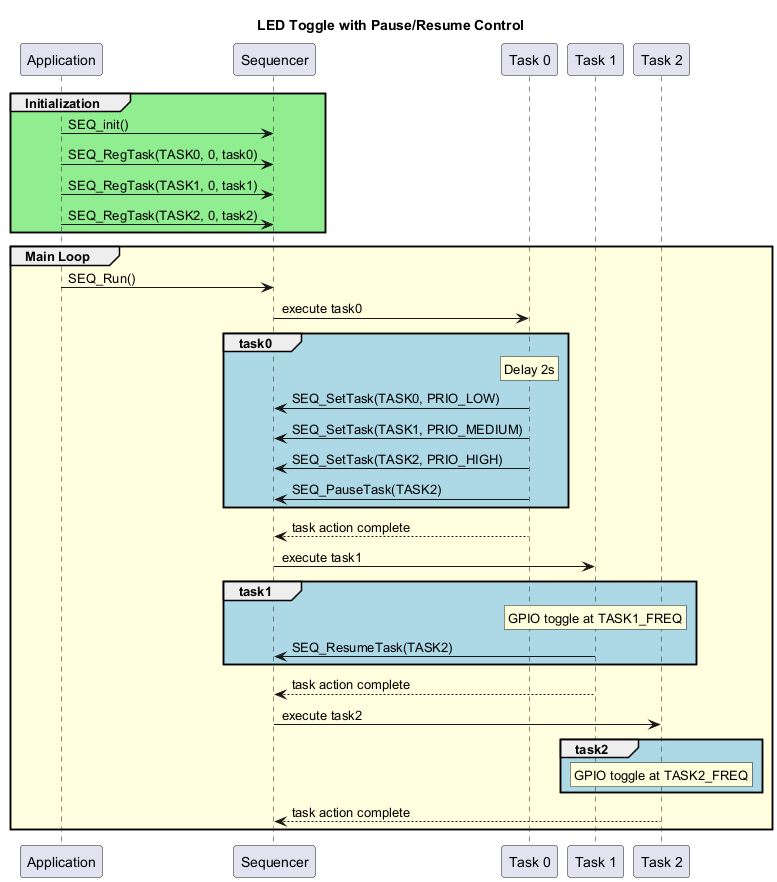
Task Pause/Resume (LED Toggle) ¶
This use case extends the task priority management example by using a pause/resume mechanism to adjust the execution order.
It requires:
A controller task (Task 0) that delays for 2 seconds, enables all tasks, and initially suspends Task 2.
A worker task (Task 1) that toggles a GPIO at
TASK1_FREQand resumes Task 2 afterward.A worker task (Task 2) that toggles a GPIO at
TASK2_FREQonce it has been resumed.
The code required for the pause/resume use case is as follows:
Task 0 function (delay, enable all, suspend Task 2):
void task0(void)
{
/* Wait 2 seconds before configuring execution state */
HAL_Delay(2000);
/* Enable all tasks for execution */
SEQ_SetTask(TASK0, PRIO_LOW);
SEQ_SetTask(TASK1, PRIO_MEDIUM);
SEQ_SetTask(TASK2, PRIO_HIGH);
/* Pause Task 2: the Sequencer skips its execution */
SEQ_PauseTask(TASK2);
}
Task 1 function (toggle at TASK1_FREQ, then resume Task 2):
void task1(void)
{
/* Store the start time in milliseconds */
uint32_t low_freq_toggle_time_start = HAL_GetTick();
/* Loop to toggle the GPIO pin at low frequency */
do
{
HAL_GPIO_TogglePin(MX_EXAMPLE_GPIO_PORT, MX_EXAMPLE_GPIO_PIN);
/* Wait for a predefined delay (LOW_FREQ_TOGGLE_PERIOD) */
HAL_Delay(LOW_FREQ_TOGGLE_PERIOD);
/* Continue looping until the toggle time limit is reached */
} while ((HAL_GetTick() - low_freq_toggle_time_start) < GPIO_TOGGLE_DURATION);
/* Resume Task 2 to allow its execution */
SEQ_ResumeTask(TASK2);
}
Task 2 function (toggle at TASK2_FREQ when not suspended):
void task2(void)
{
/* Store the start time in milliseconds */
uint32_t high_freq_toggle_time_start = HAL_GetTick();
/* Loop to toggle the GPIO pin at high frequency */
do
{
HAL_GPIO_TogglePin(MX_EXAMPLE_GPIO_PORT, MX_EXAMPLE_GPIO_PIN);
/* Wait for a predefined delay (HIGH_FREQ_TOGGLE_PERIOD) */
HAL_Delay(HIGH_FREQ_TOGGLE_PERIOD);
/* Continue looping until the toggle time limit is reached */
} while ((HAL_GetTick() - high_freq_toggle_time_start) < GPIO_TOGGLE_DURATION);
}
The following diagram summarizes this pause/resume sequence:
Note
SysTick is used here for simplicity, but any periodic source can trigger the task (hardware timer ISR, RTC alarm, external interrupt, DMA callback, or an event set by another module). This note applies to all use cases where a periodic trigger is referenced.
List of Sequencer Examples ¶
The following table lists the available examples:
|
Example Name |
Description |
|---|---|
|
Periodic task execution performing a GPIO toggle. |
|
|
Task priority management using three tasks that perform GPIO toggling. |