
HAL FDCAN Use Cases ¶
Prerequisite ¶
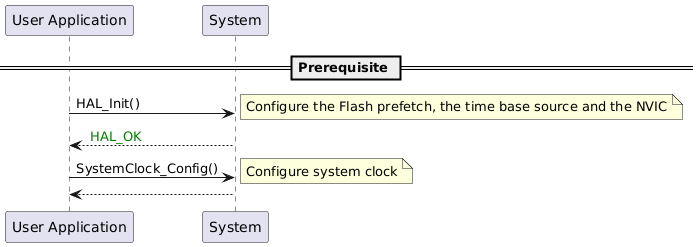
Full FDCAN Initialization Sequence ¶
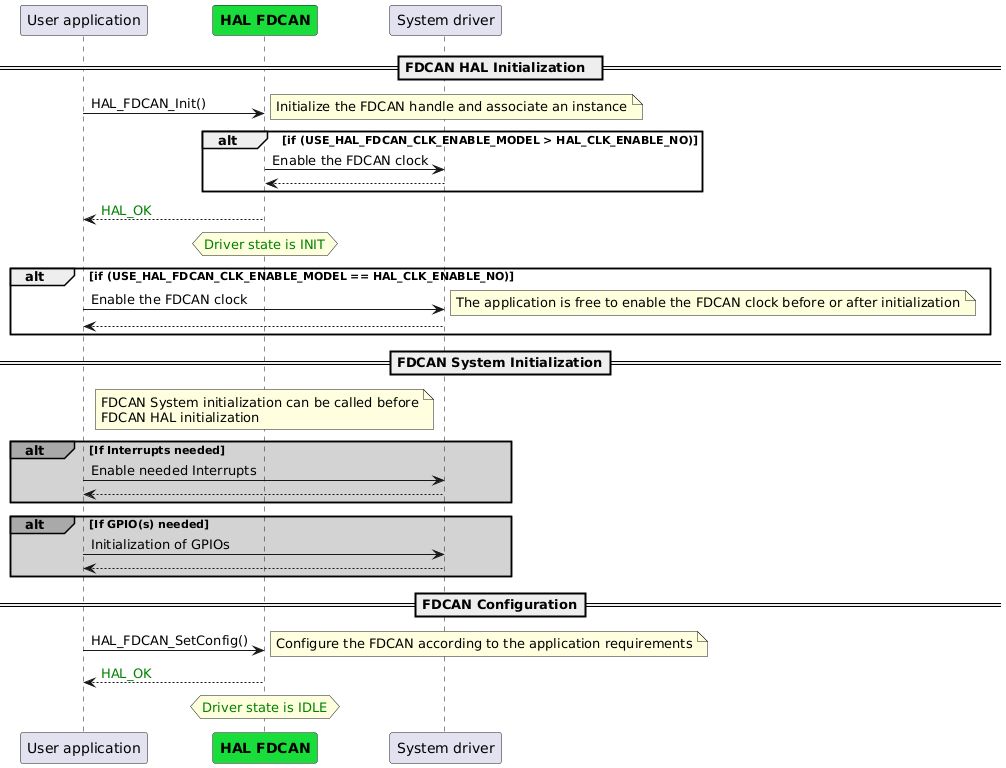
Functions called:
Full FDCAN Initialization and Configuration Sequence ¶
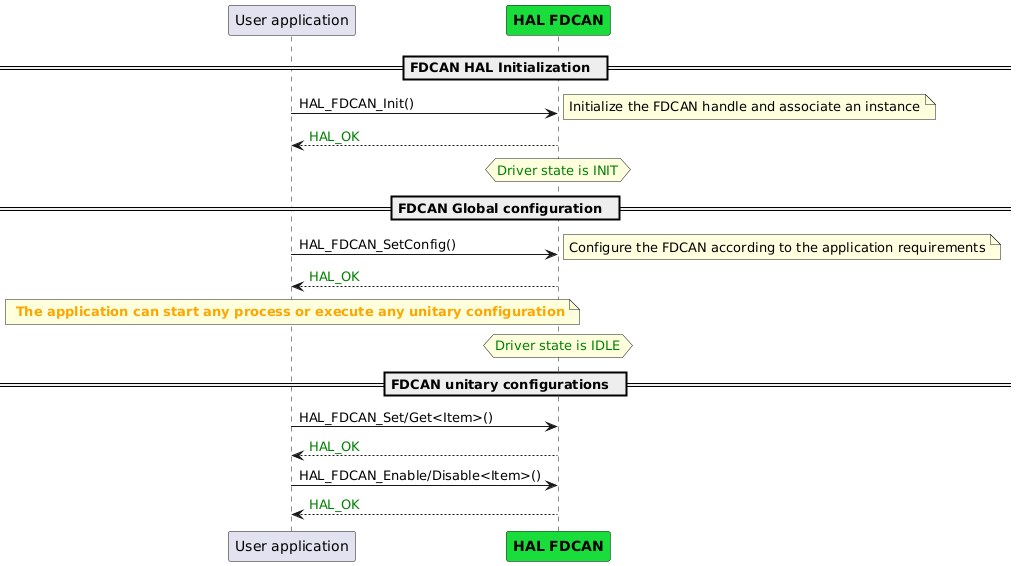
Functions called:
HAL_FDCAN_SetXXX()HAL_FDCAN_GetXXX()HAL_FDCAN_EnableXXX()HAL_FDCAN_DisableXXX()
Full FDCAN Deinitialization Sequence ¶
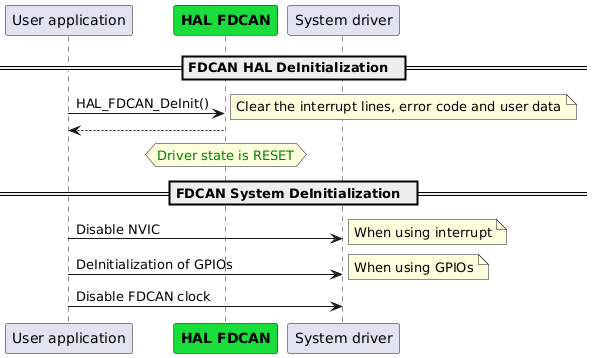
Functions called:
FDCAN Transmit Message Polling Mode Using HAL_FDCAN_GetTxFifoFreeLevel ¶
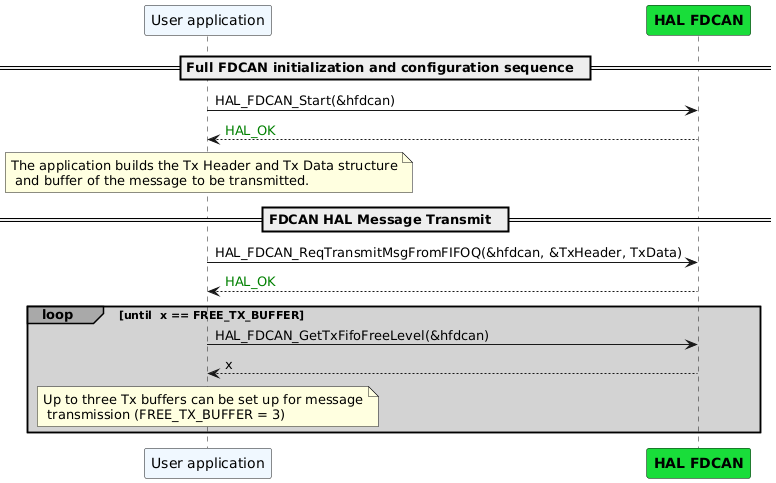
Functions called:
FDCAN Transmit Message Polling Mode Using HAL_FDCAN_GetTxBufferMessageStatus ¶
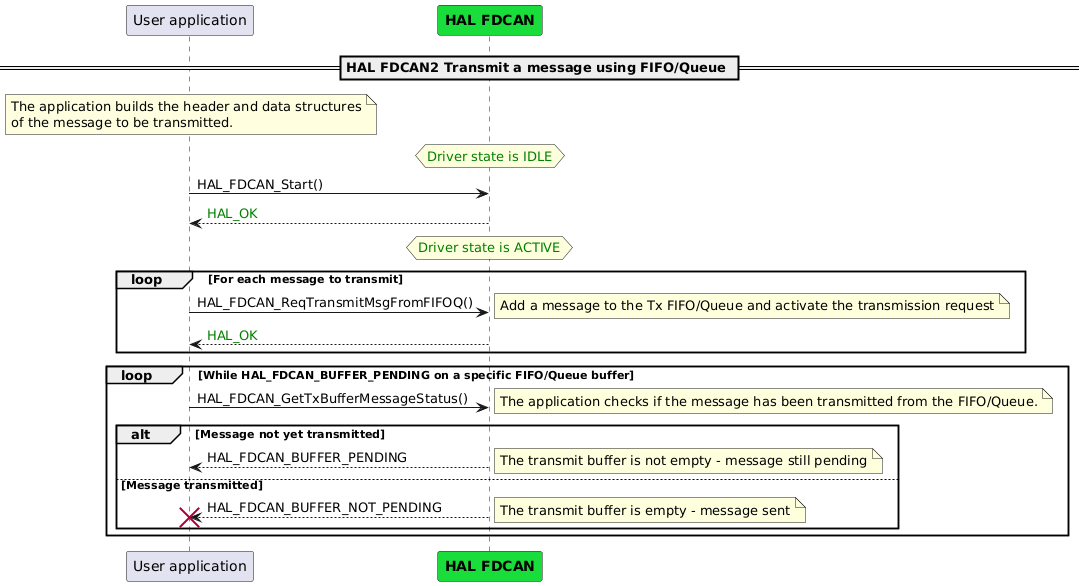
Functions called:
FDCAN Reading Message Polling Mode Using HAL_FDCAN_GetRxFifoFillLevel ¶
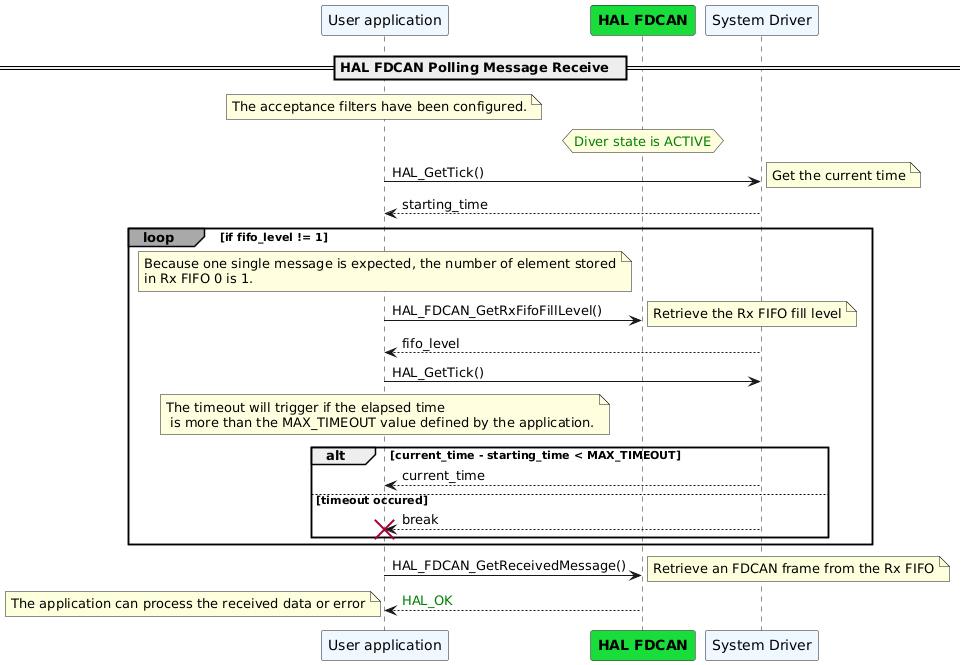
Functions called:
FDCAN Transmission with IT Using Tx Complete/Tx Cancellation Interrupts ¶
![@startuml
participant "User application" as App#AliceBlue
participant "<font color=black><b>HAL FDCAN" as FDCAN #19DD3A
participant "FDCAN_IRQHandler" as IRQHandler#AliceBlue
== Full FDCAN initialization and configuration sequence ==
App -> FDCAN: HAL_FDCAN_Start(handle)
FDCAN --> App:<color green>HAL_OK
== FDCAN HAL Message Transmit on IT ==
Note over App#lightyellow: This sequence diagram shows how Tx Complete or Tx Abort events from Tx Buffer 0 trigger interrupts on Line 1. Both interrupts are part of HAL_FDCAN_IT_GROUP_STATUS_MSG group.
FDCAN --> App:<color green>HAL_OK
App -> FDCAN: HAL_FDCAN_EnableInterruptLines(handle, HAL_FDCAN_IT_LINE_1)
FDCAN --> App:<color green>HAL_OK
App -> FDCAN: HAL_FDCAN_EnableInterrupts(handle, HAL_FDCAN_IT_TX_COMPLETE | HAL_FDCAN_IT_TX_ABORT_COMPLETE)
FDCAN --> App:<color green>HAL_OK
Note over App#lightgreen: For Transmission Completed and Transmission Cancellation Finished interrupts,\na buffer index must be provided to indicate on which buffer the interrupt will occur:\nHAL_FDCAN_TX_IT_BUFFER_0 in the present example.
alt#darkgrey #lightgrey if interrupt = HAL_FDCAN_IT_TX_COMPLETE
App -> FDCAN: HAL_FDCAN_EnableTxBufferCompleteInterrupts(handle, HAL_FDCAN_TX_IT_BUFFER_0)
FDCAN --> App:<color green>HAL_OK
else interrupt = HAL_FDCAN_IT_TX_ABORT_COMPLETE
App -> FDCAN: HAL_FDCAN_EnableTxBufferCancellationInterrupts(handle, HAL_FDCAN_TX_IT_BUFFER_0)
FDCAN --> App:<color green>HAL_OK
end
App -> FDCAN: HAL_FDCAN_Start(handle)
FDCAN --> App:<color green>HAL_OK
Note over App#lightyellow: The TxHeader and TxData are configured. Because there is only a single\ntx message TX BUFFER 0 will be the default buffer used for transmission.
App -> FDCAN: HAL_FDCAN_ReqTransmitMsgFromFIFOQ(handle, &TxHeader, &TxData)
FDCAN --> App:<color green>HAL_OK
alt#darkgrey #lightgrey if interrupt = HAL_FDCAN_IT_TX_COMPLETE
App-[hidden]->App
activate App
Note over IRQHandler#lightgreen: The interrupt Tx complete event from the system can be processed by IRQ Handler.
IRQHandler <- : FDCAN interrupt Tx Complete
IRQHandler -> FDCAN: HAL_FDCAN_IRQHandler
App -> App: wait for an event from Tx Complete callback
FDCAN -> App: HAL_FDCAN_TxBufferCompleteCallback()
App --> FDCAN:
FDCAN --> IRQHandler:
IRQHandler --> :
App-[hidden]->App
deactivate App
else interrupt = HAL_FDCAN_IT_TX_ABORT_COMPLETE
App-[hidden]->App
activate App
Note over IRQHandler#lightgreen: The interrupt Tx cancellation finished event from the system can be processed by IRQ Handler.
IRQHandler <- : FDCAN interrupt Tx Cancellation Finished
IRQHandler -> FDCAN: HAL_FDCAN_IRQHandler
App -> App: wait for an event from Tx cancellation finished callback
FDCAN -> App: HAL_FDCAN_TxBufferAbortCallback()
App --> FDCAN:
FDCAN --> IRQHandler:
IRQHandler --> :
deactivate App
App-[hidden]->App
end
Note over App#lightgreen: The User application must disable the buffer connected to the interrupt.
alt#darkgrey #lightgrey if interrupt = HAL_FDCAN_IT_TX_COMPLETE
App -> FDCAN: HAL_FDCAN_DisableTxBufferCompleteInterrupts(handle, HAL_FDCAN_TX_IT_BUFFER_0)
FDCAN --> App:<color green>HAL_OK
else interrupt = HAL_FDCAN_IT_TX_ABORT_COMPLETE
App -> FDCAN: HAL_FDCAN_DisableTxBufferCancellationInterrupts(handle, HAL_FDCAN_TX_IT_BUFFER_0)
FDCAN --> App:<color green>HAL_OK
end
App -> FDCAN: HAL_FDCAN_DisableInterrupts(handle, HAL_FDCAN_IT_TX_COMPLETE | HAL_FDCAN_IT_TX_ABORT_COMPLETE)
FDCAN --> App:<color green>HAL_OK
App -> FDCAN: HAL_FDCAN_DisableInterruptLines(handle, HAL_FDCAN_IT_LINE_1)
FDCAN --> App:<color green>HAL_OK
@enduml](../../../../_images/plantuml-3fef062b7b1e19951bba5c93bc26fc142135c2de.png)
Functions called:
FDCAN Receiving Message Using the Rx High-Priority Message Interrupt (HPME) ¶
![@startuml
participant "User application" as App#AliceBlue
participant "<font color=black><b>HAL FDCAN" as FDCAN #19DD3A
participant "NVIC" as NVIC#AliceBlue
== FDCAN HAL Receive High priority message with IT ==
hnote over FDCAN
<font color=green>Diver state is IDLE
end note
note over App: Create filters element to select the Rx High Priority message.
App->FDCAN: HAL_FDCAN_SetFilter()
FDCAN-->App:<color green> HAL_OK
note over App
The application can create specific acceptance rules for the messages selected by the filters
end note
App -> FDCAN: HAL_FDCAN_SetGlobalFilter()
FDCAN --> App:<color green> HAL_OK
App -> FDCAN: HAL_FDCAN_EnableInterrupts(handle, HAL_FDCAN_IT_RX_HIGH_PRIORITY_MSG)
FDCAN --> App:<color green> HAL_OK
App -> FDCAN: HAL_FDCAN_SetInterruptGroupsToLine(handle, HAL_FDCAN_IT_GROUP_STATUS_MSG, HAL_FDCAN_IT_LINE_[0|1])
Note right
Assign the interrupt Status Message Group to an interrupt Line.
endnote
FDCAN --> App:<color green> HAL_OK
App -> FDCAN: HAL_FDCAN_EnableInterruptLines(handle, HAL_FDCAN_IT_LINE_[0|1])
FDCAN --> App:<color green> HAL_OK
App -> FDCAN: HAL_FDCAN_Start()
FDCAN --> App:<color green> HAL_OK
hnote over FDCAN
<font color=green>Diver state is ACTIVE
end note
App[#FFFFFF]-> App
activate App #1000DA
hnote over App
<font color=blue>reception ongoing...
end note
NVIC <- : FDCAN interrupt High Priority Message received
NVIC -> FDCAN: HAL_FDCAN_IRQHandler
FDCAN -> App: HAL_FDCAN_HighPriorityMessageCallback()
App --> FDCAN:
deactivate App
FDCAN --> NVIC:
NVIC --> :
App -> FDCAN: HAL_FDCAN_GetReceivedMessage()
note right
Retrieve an FDCAN frame from the Rx FIFO
endnote
FDCAN --> App:<color green> HAL_OK
App -> FDCAN: HAL_FDCAN_DisableInterruptLines(handle, HAL_FDCAN_IT_LINE_[0|1])
FDCAN --> App:<color green> HAL_OK
App -> FDCAN: HAL_FDCAN_DisableInterrupts(handle, HAL_FDCAN_IT_RX_HIGH_PRIORITY_MSG)
FDCAN --> App:<color green> HAL_OK
@enduml](../../../../_images/plantuml-5f914df75288957b94d103ab18ef057df7729847.png)
Functions called:
FDCAN Transmit Abort Using Transmission Cancellation Finished Interrupt ¶
![@startuml
participant "User application" as App#AliceBlue
participant "<font color=black><b>HAL FDCAN" as FDCAN #19DD3A
participant "NVIC" as NVIC#AliceBlue
== FDCAN HAL IT Transmit Cancellation complete ==
Note over App#lightyellow: The acceptance filters, headers and data structres have been\nconfigured, the driver is initialized and configured
hnote over FDCAN
<font color=green>Driver state is ACTIVE
end note
App -> FDCAN: HAL_FDCAN_EnableInterrupts(handle, HAL_FDCAN_IT_TX_ABORT_COMPLETE)
FDCAN -->App : <color green>HAL_OK
App -> FDCAN: HAL_FDCAN_SetInterruptGroupsToLine(handle, HAL_FDCAN_IT_GROUP_STATUS_MSG, HAL_FDCAN_IT_LINE_[0|1] )
FDCAN -->App : <color green>HAL_OK
App -> FDCAN: HAL_FDCAN_EnableInterruptLines(handle, HAL_FDCAN_IT_LINE_[0|1])
FDCAN -->App : <color green>HAL_OK
App -> FDCAN: HAL_FDCAN_ReqTransmitMsgFromFIFOQ()
FDCAN -->App : <color green>HAL_OK
Note over App: <color orange><b>The application wants to abort the last message added to the fifo before being sent</b>
App -> FDCAN: HAL_FDCAN_GetLatestTxFifoQRequestBuffer()
note right
Get the last buffer sent for transmission.
endnote
FDCAN --> App: <color black>selected buffer
App -> FDCAN: HAL_FDCAN_EnableTxBufferCancellationInterrupts(handle, HAL_FDCAN_TX_IT_BUFFER_0)
FDCAN -->App : <color green>HAL_OK
App -> FDCAN : HAL_FDCAN_ReqAbortOfTxBuffer(handle, HAL_FDCAN_TX_IT_BUFFER_0)
FDCAN -->App : <color green>HAL_OK
...
NVIC <- : FDCAN interrupt Transmission Cancellation finished
note left
The cancellation of the selected buffer has just finished
endnote
NVIC -> FDCAN : HAL_FDCAN_IRQHandler
FDCAN -> App : HAL_FDCAN_TxBufferAbortCallback()
App --> FDCAN :
FDCAN --> NVIC:
NVIC --> :
App -> FDCAN: HAL_FDCAN_DisableTxBufferCancellationInterrupts(handle, HAL_FDCAN_TX_IT_BUFFER_0)
FDCAN -->App : <color green>HAL_OK
App -> FDCAN: HAL_FDCAN_DisableInterrupts(handle, HAL_FDCAN_IT_TX_ABORT_COMPLETE)
FDCAN -->App : <color green>HAL_OK
App -> FDCAN: HAL_FDCAN_DisableInterruptLines(handle, HAL_FDCAN_IT_LINE_[0|1])
FDCAN -->App : <color green>HAL_OK
@enduml](../../../../_images/plantuml-9c46dc8a5bde4fbc647a1e21c0d627b382a9136f.png)
Functions called: